Demo - Lid driven cavity¶
Mikael Mortensen (email: mikaem@math.uio.no), Department of Mathematics, University of Oslo.
Date: May 6, 2019
Summary. The lid driven cavity is a classical benchmark for Navier Stokes solvers. This is a demonstration of how the Python module shenfun can be used to solve the lid driven cavity problem with full spectral accuracy using a mixed (coupled) basis in a 2D tensor product domain. The demo also shows how to use mixed tensor product spaces for vector valued equations. Note that the regular lid driven cavity, where the top wall has constant velocity and the remaining three walls are stationary, has a singularity at the two upper corners, where the velocity is discontinuous. Due to their global nature, spectral methods are usually not very good at handling problems with discontinuities, and for this reason we will also look at a regularized lid driven cavity, where the top lid moves according to \((1-x)^2(1+x)^2\), thus removing the corner discontinuities.
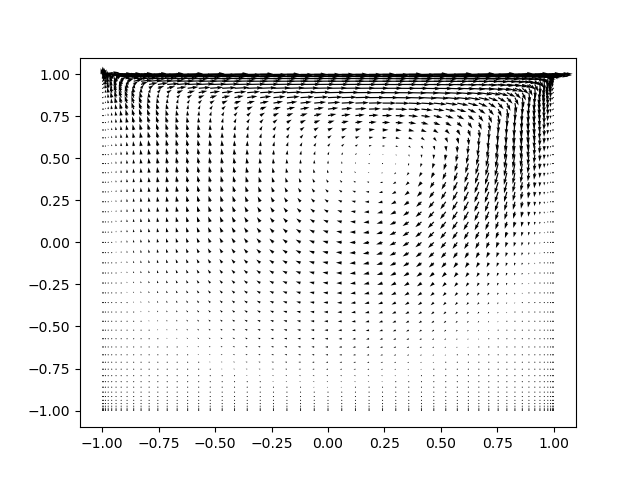
Figure 1: Velocity vectors for the lid driven cavity at Reynolds number 100.
Tensor product spaces¶
With the Galerkin method we need function spaces for both velocity and pressure, as well as for the nonlinear right hand side. A Dirichlet space will be used for velocity, whereas there is no boundary restriction on the pressure space. For both two-dimensional spaces we will use one basis function for the \(x\)-direction, \(\mathcal{X}_k(x)\), and one for the \(y\)-direction, \(\mathcal{Y}_l(y)\). And then we create two-dimensional basis functions like
and solutions (trial functions) as
For the homogeneous Dirichlet boundary condition the basis functions \(\mathcal{X}_k(x)\) and \(\mathcal{Y}_l(y)\) are chosen as composite Legendre polynomials (we could also use Chebyshev):
where \(\boldsymbol{k}^{N_0-2} = (0, 1, \ldots, N_0-3)\), \(\boldsymbol{l}^{N_1-2} = (0, 1, \ldots, N_1-3)\) and \(N = (N_0, N_1)\) is the number of quadrature points in each direction. Note that \(N_0\) and \(N_1\) do not need to be the same. The basis funciton (3) satisfies the homogeneous Dirichlet boundary conditions at \(x=\pm 1\) and (4) the same at \(y=\pm 1\). As such, the basis function \(v_{kl}(x, y)\) satisfies the homogeneous Dirichlet boundary condition for the entire domain.
With shenfun we create these homogeneous spaces, \(D_0^{N_0}(x)=\text{span}\{L_k-L_{k+2}\}_{k=0}^{N_0-2}\) and \(D_0^{N_1}(y)=\text{span}\{L_l-L_{l+2}\}_{l=0}^{N_1-2}\) as
N = (45, 45)
family = 'Legendre' # or use 'Chebyshev'
quad = 'GL' # for Chebyshev use 'GC' or 'GL'
D0X = FunctionSpace(N[0], family, quad=quad, bc=(0, 0))
D0Y = FunctionSpace(N[1], family, quad=quad, bc=(0, 0))
The spaces are here the same, but we will use D0X in the \(x\)-direction and
D0Y in the \(y\)-direction. But before we use these bases in
tensor product spaces, they remain identical as long as \(N_0 = N_1\).
Special attention is required by the moving lid. To get a solution with nonzero boundary condition at \(y=1\) we need to add one more basis function that satisfies that solution. In general, a nonzero boundary condition can be added on both sides of the domain using the following basis
And then the unknown component \(N_1-2\) decides the value at \(y=1\), whereas the unknown at \(N_1-1\) decides the value at \(y=-1\). Here we only need to add the \(N_1-2\) component, but for generality this is implemented in shenfun using both additional basis functions. We create the space \(D_1^{N_1}(y)=\text{span}\{\mathcal{Y}_l(y)\}_{l=0}^{N_1-1}\) as
D1Y = FunctionSpace(N[1], family, quad=quad, bc=(0, 1))
where bc=(0, 1) fixes the values for \(y=-1\) and \(y=1\), respectively.
For a regularized lid driven cavity the velocity of the top lid is
\((1-x)^2(1+x)^2\) and not unity. To implement this boundary condition
instead, we can make use of sympy and
quite straight forward do
import sympy
x = sympy.symbols('x')
#D1Y = FunctionSpace(N[1], family, quad=quad, bc=(0, (1-x)**2*(1+x)**2))
Uncomment the last line to run the regularized boundary conditions. Otherwise, there is no difference at all between the regular and the regularized lid driven cavity implementations.
The pressure basis that comes with no restrictions for the boundary is a little trickier. The reason for this has to do with inf-sup stability. The obvious choice of basis functions are the regular Legendre polynomials \(L_k(x)\) in \(x\) and \(L_l(y)\) in the \(y\)-directions. The problem is that for the natural choice of \((k, l) \in \boldsymbol{k}^{N_0} \times \boldsymbol{l}^{N_1}\) there are nullspaces and the problem is not well-defined. It turns out that the proper choice for the pressure basis is simply the regular Legendre basis functions, but for \((k, l) \in \boldsymbol{k}^{N_0-2} \times \boldsymbol{l}^{N_1-2}\). The bases \(P^{N_0}(x)=\text{span}\{L_k(x)\}_{k=0}^{N_0-3}\) and \(P^{N_1}(y)=\text{span}\{L_l(y)\}_{l=0}^{N_1-3}\) are created as
PX = FunctionSpace(N[0], family, quad=quad)
PY = FunctionSpace(N[1], family, quad=quad)
PX.slice = lambda: slice(0, N[0]-2)
PY.slice = lambda: slice(0, N[1]-2)
Note that we still use these spaces with the same \(N_0 \cdot N_1\) quadrature points in real space, but the two highest frequencies have been set to zero.
We have now created all relevant function spaces for the problem at hand. It remains to combine these spaces into tensor product spaces, and to combine tensor product spaces into mixed (coupled) tensor product spaces. From the Dirichlet bases we create two different tensor product spaces, whereas one is enough for the pressure
With shenfun the tensor product spaces are created as
V1 = TensorProductSpace(comm, (D0X, D1Y))
V0 = TensorProductSpace(comm, (D0X, D0Y))
P = TensorProductSpace(comm, (PX, PY), modify_spaces_inplace=True)
/home/docs/checkouts/readthedocs.org/user_builds/shenfun/conda/latest/lib/python3.13/site-packages/shenfun/matrixbase.py:171: FutureWarning: Input has data type int64, but the output has been cast to float64. In the future, the output data type will match the input. To avoid this warning, set the `dtype` parameter to `None` to have the output dtype match the input, or set it to the desired output data type.
self._diags = sp_diags(list(self.values()),
where modify_spaces_inplace=True makes use of PX and
PY directly. These spaces have now been modified to fit in
the TensorProductSpace P, along two different directions and as such
the original spaces have been modified. The default behavior in shenfun
is to make copies of the 1D spaces under the hood, and thus leave PX
and PY untouched. In that case the two new and modified spaces would be accessible
from P.bases.
Note that all these tensor product spaces are scalar valued. The velocity is a vector, and a vector requires a mixed vector basis like \(W_1^{\boldsymbol{N}} = V_1^{\boldsymbol{N}} \times V_0^{\boldsymbol{N}}\). The vector basis is created in shenfun as
W1 = VectorSpace([V1, V0])
W0 = VectorSpace([V0, V0])
Note that the second vector basis, \(W_0^{\boldsymbol{N}} = V_0^{\boldsymbol{N}} \times V_0^{\boldsymbol{N}}\), uses homogeneous boundary conditions throughout.
Mixed variational form¶
We now formulate a variational problem using the Galerkin method: Find \(\boldsymbol{u} \in W_1^{\boldsymbol{N}}\) and \(p \in P^{\boldsymbol{N}}\) such that
Note that we are using test functions \(\boldsymbol{v}\) with homogeneous boundary conditions.
The first obvious issue with Eq (11) is the nonlinearity. In other words we will need to linearize and iterate to be able to solve these equations with the Galerkin method. To this end we will introduce the solution on iteration \(k \in [0, 1, \ldots]\) as \(\boldsymbol{u}^k\) and compute the nonlinearity using only known solutions \(\int_{\Omega} (\nabla \cdot \boldsymbol{u}^k\boldsymbol{u}^k) \cdot \boldsymbol{v}\, dxdy\). Using further integration by parts we end up with the equations to solve for iteration number \(k+1\) (using \(\boldsymbol{u} = \boldsymbol{u}^{k+1}\) and \(p=p^{k+1}\) for simplicity)
Note that the nonlinear term may also be integrated by parts and evaluated as \(\int_{\Omega}-\boldsymbol{u}^k\boldsymbol{u}^k \, \colon \nabla \boldsymbol{v} \, dxdy\). All boundary integrals disappear since we are using test functions with homogeneous boundary conditions.
Since we are to solve for \(\boldsymbol{u}\) and \(p\) at the same time, we formulate a mixed (coupled) problem: find \((\boldsymbol{u}, p) \in W_1^{\boldsymbol{N}} \times P^{\boldsymbol{N}}\) such that
where bilinear (\(a\)) and linear (\(L\)) forms are given as
Note that the bilinear form will assemble to a block matrix, whereas the right hand side linear form will assemble to a block vector. The bilinear form does not change with the solution and as such it does not need to be reassembled inside an iteration loop.
The algorithm used to solve the equations are:
Set \(k = 0\)
Guess \(\boldsymbol{u}^0 = (0, 0)\)
while not converged:
assemble \(L((\boldsymbol{v}, q); \boldsymbol{u}^{k})\)
solve \(a((\boldsymbol{u}, p), (\boldsymbol{v}, q)) = L((\boldsymbol{v}, q); \boldsymbol{u}^{k})\) for \(\boldsymbol{u}^{k+1}, p^{k+1}\)
compute error = \(\int_{\Omega} (\boldsymbol{u}^{k+1}-\boldsymbol{u}^{k})^2 \, dxdy\)
if error \(<\) some tolerance then converged = True
\(k\) += \(1\)
Implementation of solver¶
We will now implement the coupled variational problem described in previous sections. First of all, since we want to solve for the velocity and pressure in a coupled solver, we have to create a mixed tensor product space \(VQ = W_1^{\boldsymbol{N}} \times P^{\boldsymbol{N}}\) that couples velocity and pressure
VQ = CompositeSpace([W1, P]) # Coupling velocity and pressure
We can now create test- and trialfunctions for the coupled space \(VQ\), and then split them up into components afterwards:
up = TrialFunction(VQ)
vq = TestFunction(VQ)
u, p = up
v, q = vq
Note
The test function v is using homogeneous Dirichlet boundary conditions even
though it is derived from VQ, which contains W1. It is currently not (and will
probably never be) possible to use test functions with inhomogeneous
boundary conditions.
With the basisfunctions in place we may assemble the different blocks of the final coefficient matrix. For this we also need to specify the kinematic viscosity, which is given here in terms of the Reynolds number:
Re = 100.
nu = 2./Re
if family.lower() == 'legendre':
A = inner(grad(v), -nu*grad(u))
G = inner(div(v), p)
else:
A = inner(v, nu*div(grad(u)))
G = inner(v, -grad(p))
D = inner(q, div(u))
The assembled subsystems A, G and D are lists containg the different blocks of
the complete, coupled, coefficient matrix. A actually contains 4
tensor product matrices of type TPMatrix. The first two
matrices are for vector component zero of the test function v[0] and
trial function u[0], the
matrices 2 and 3 are for components 1. The first two matrices are as such for
A[0:2] = inner(grad(v[0]), -nu*grad(u[0]))
Breaking it down the inner product is mathematically
We can now insert for test function \(\boldsymbol{v}[0]\)
and trialfunction
where \(\hat{\boldsymbol{u}}\) are the unknown degrees of freedom for the velocity vector. Notice that the sum over the second index runs all the way to \(N_1-1\), whereas the other indices runs to either \(N_0-3\) or \(N_1-3\). This is because of the additional basis functions required for the inhomogeneous boundary condition.
Inserting for these basis functions into (18), we obtain after a few trivial manipulations
We see that each tensor product matrix (both A[0] and A[1]) is composed as outer products of two smaller matrices, one for each dimension. The first tensor product matrix, A[0], is
where \(C\in \mathbb{R}^{N_0-2 \times N_1-2}\) and \(F \in \mathbb{R}^{N_0-2 \times N_1}\). Note that due to the inhomogeneous boundary conditions this last matrix \(F\) is actually not square. However, remember that all contributions from the two highest degrees of freedom (\(\hat{\boldsymbol{u}}[0]_{m,N_1-2}\) and \(\hat{\boldsymbol{u}}[0]_{m,N_1-1}\)) are already known and they can, as such, be moved directly over to the right hand side of the linear algebra system that is to be solved. More precisely, we can split the tensor product matrix into two contributions and obtain
where the first term on the right hand side is square and the second term is known and can be moved to the right hand side of the linear algebra equation system.
At this point all matrices, both regular and boundary matrices, are contained within the three lists A, G and D. We can now create a solver for block matrices that incorporates these boundary conditions automatically
sol = la.BlockMatrixSolver(A+G+D)
In the solver sol there is now a regular block matrix found in
sol.mat, which is the symmetric
The boundary matrices are similarly collected in a boundary block matrix
in sol.bc_mat. This matrix is used under the hood to modify the
right hand side.
We now have all the matrices we need in order to solve the Navier Stokes equations. However, we also need some work arrays for iterations
# Create Function to hold solution. Use set_boundary_dofs to fix the degrees
# of freedom in uh_hat that determines the boundary conditions.
uh_hat = Function(VQ).set_boundary_dofs()
ui_hat = uh_hat[0]
# New solution (iterative)
uh_new = Function(VQ).set_boundary_dofs()
ui_new = uh_new[0]
The nonlinear right hand side also requires some additional attention. Nonlinear terms are usually computed in physical space before transforming to spectral. For this we need to evaluate the velocity vector on the quadrature mesh. We also need a rank 2 Array to hold the outer product \(\boldsymbol{u}\boldsymbol{u}\). The required arrays and spaces are created as
bh_hat = Function(VQ)
# Create arrays to hold velocity vector solution
ui = Array(W1)
# Create work arrays for nonlinear part
QT = CompositeSpace([W1, W0]) # for uiuj
uiuj = Array(QT)
uiuj_hat = Function(QT)
The right hand side \(L((\boldsymbol{v}, q);\boldsymbol{u}^{k});\) is computed in its
own function compute_rhs as
def compute_rhs(ui_hat, bh_hat):
global ui, uiuj, uiuj_hat, V1, bh_hat0
bh_hat.fill(0)
ui = W1.backward(ui_hat, ui)
uiuj = outer(ui, ui, uiuj)
uiuj_hat = uiuj.forward(uiuj_hat)
bi_hat = bh_hat[0]
bi_hat = inner(v, div(uiuj_hat), output_array=bi_hat)
#bi_hat = inner(grad(v), -uiuj_hat, output_array=bi_hat)
return bh_hat
Here outer() is a shenfun function that computes the
outer product of two vectors and returns the product in a rank two
array (here uiuj). With uiuj forward transformed to uiuj_hat
we can assemble the linear form either as inner(v, div(uiuj_hat) or
inner(grad(v), -uiuj_hat).
Now all that remains is to guess an initial solution and solve iteratively until convergence. For initial solution we simply set the velocity and pressure to zero. With an initial solution we are ready to start iterating. However, for convergence it is necessary to add some underrelaxation \(\alpha\), and update the solution each time step as
where \(\hat{\boldsymbol{u}}^*\) and \(\hat{p}^*\) are the newly computed velocity
and pressure returned from M.solve. Without underrelaxation the solution
will quickly blow up. The iteration loop goes as follows
converged = False
count = 0
alfa = 0.5
while not converged:
count += 1
bh_hat = compute_rhs(ui_hat, bh_hat)
uh_new = sol(bh_hat, u=uh_new, constraints=((2, 0, 0),))
error = np.linalg.norm(ui_hat-ui_new)
uh_hat[:] = alfa*uh_new + (1-alfa)*uh_hat
converged = abs(error) < 1e-8 or count >= 100
print('Iteration %d Error %2.4e' %(count, error))
up = uh_hat.backward()
u, p = up
X = V0.local_mesh(True)
plt.figure()
plt.quiver(X[0], X[1], u[0], u[1])
Iteration 1 Error 8.5648e+00
Iteration 2 Error 4.2986e+00
Iteration 3 Error 2.1518e+00
Iteration 4 Error 1.0731e+00
Iteration 5 Error 5.3935e-01
Iteration 6 Error 2.7339e-01
Iteration 7 Error 1.3959e-01
Iteration 8 Error 7.1915e-02
Iteration 9 Error 3.7490e-02
Iteration 10 Error 1.9937e-02
Iteration 11 Error 1.0955e-02
Iteration 12 Error 6.1707e-03
Iteration 13 Error 3.4384e-03
Iteration 14 Error 1.9036e-03
Iteration 15 Error 1.1460e-03
Iteration 16 Error 7.4978e-04
Iteration 17 Error 4.7012e-04
Iteration 18 Error 2.8977e-04
Iteration 19 Error 2.0676e-04
Iteration 20 Error 1.5348e-04
Iteration 21 Error 1.0054e-04
Iteration 22 Error 6.2570e-05
Iteration 23 Error 4.4921e-05
Iteration 24 Error 3.3152e-05
Iteration 25 Error 2.1942e-05
Iteration 26 Error 1.4881e-05
Iteration 27 Error 1.1424e-05
Iteration 28 Error 8.2461e-06
Iteration 29 Error 5.3494e-06
Iteration 30 Error 3.7853e-06
Iteration 31 Error 2.9557e-06
Iteration 32 Error 2.0822e-06
Iteration 33 Error 1.3564e-06
Iteration 34 Error 9.9917e-07
Iteration 35 Error 7.7367e-07
Iteration 36 Error 5.3417e-07
Iteration 37 Error 3.5675e-07
Iteration 38 Error 2.6857e-07
Iteration 39 Error 2.0222e-07
Iteration 40 Error 1.3839e-07
Iteration 41 Error 9.6097e-08
Iteration 42 Error 7.2519e-08
Iteration 43 Error 5.2854e-08
Iteration 44 Error 3.6492e-08
Iteration 45 Error 2.6314e-08
Iteration 46 Error 1.9563e-08
Iteration 47 Error 1.3930e-08
Iteration 48 Error 9.8734e-09
<matplotlib.quiver.Quiver at 0x7f031794b4d0>
Note that the constraints=((2, 0, 0),) keyword argument
ensures that the pressure integrates to zero, i.e., \(\int_{\Omega} p \omega dxdy=0\).
Here the number 2 tells us that block component 2 in the mixed space
(the pressure) should be integrated, dof 0 should be fixed, and it
should be fixed to 0.
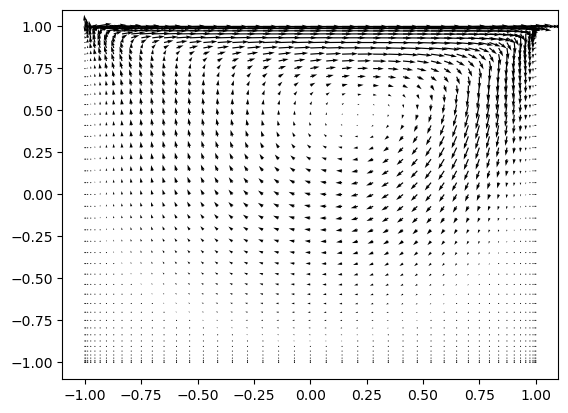
The last three lines plots velocity vectors, like also seen in the figure 1 in the top of this demo. The solution is apparently nice and smooth, but hidden underneath are Gibbs oscillations from the corner discontinuities. This is painfully obvious when switching from Legendre to Chebyshev polynomials. With Chebyshev the same plot looks like the Figure 2 below. However, choosing instead the regularized lid, with no discontinuities, the solutions will be nice and smooth, both for Legendre and Chebyshev polynomials.
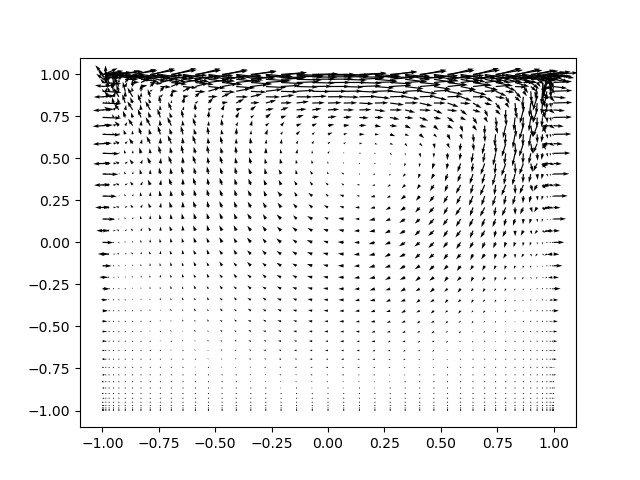
Figure 2: Velocity vectors for Re=100 using Chebyshev.
Complete solver¶
A complete solver can be found in demo NavierStokesDrivenCavity.py.